ROBOTICA
¿QUE ES?
Los primeros robots creados en toda la historia de la humanidad, no tenían más que un solo fin: entretener a sus dueños, así, a mediados del siglo XVIII J. de Vaucanson construyó varias muñecas mecánicas de tamaño humano que ejecutaban piezas de música.
Poco a poco, los expertos de la época, comenzaron a darse cuenta de que los robots eran capaces de imitar movimientos humanos o de criaturas vivas, lo cual permitiría que éstos realizaran movimientos mecánicos y ahorrar esfuerzo, tiempo y trabajo a los humanos. No es extraño suponer que los primeros robots que realizaban tareas automatizadas fueron creados para las fábricas. En 1801 J. Jaquard invento el telar, que era una máquina programable mediante tarjetas perforadas.


3. Comienzan a comercializarse los primeros robots a finales de los años 50. El primer robot comercial fue desarrollado por la empresa Planet Corporation y fue instalado por primera vez en la Ford Motors Companypara atender una máquina de fundición de troquel.
:format(jpeg):mode_rgb():quality(90)/discogs-images/R-40940-1202377844.jpeg.jpg) 4. En 1961 se instala el primer robot industrial, creado por George Devol, su nombre es Unimate. En 1968 se desarrolló un robot llamado ‘Shakey’’ por el Stanford Research Institute. Podía desplazarse por el suelo y disponía de sensores táctiles, vídeo…
4. En 1961 se instala el primer robot industrial, creado por George Devol, su nombre es Unimate. En 1968 se desarrolló un robot llamado ‘Shakey’’ por el Stanford Research Institute. Podía desplazarse por el suelo y disponía de sensores táctiles, vídeo…



Manipulador: mecánicamente, es el componente principal. Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Las partes que conforman el manipulador reciben, entre otros, los nombres de: cuerpo, brazo, muñeca y actuador final (o elemento terminal). A este último se le conoce habitualmente como aprehensor, garra, pinza o gripper.
Controlador: es el componente que regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información. El controlador recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas. Existen varios grados de control que son función del tipo de parámetros que se regulan, lo que da lugar a los siguientes tipos de controladores: de posición, cinemático, dinámicoy adaptativo.
Dispositivos de entrada y salida de datos: los más comunes son: teclado, monitor y caja de comandos (teach pendant). Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del controlador. Para mandar instrucciones al controlador y para dar de alta programas de control, comúnmente se utiliza una computadora adicional. Es necesario aclarar que algunos robots únicamente poseen uno de estos componentes. En estos casos, uno de los componentes de entrada y salida permite la realización de todas las funciones.
Dispositivos especiales: entre estos se encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones de ensamblaje, que son utilizadas para sujetar las distintas piezas de trabajo.
Es la ciencia encargada de estudiar, diseñar y fabricar máquinas que son capaces de realizar labores humanas que requieren del razonamiento, lógica e inteligencia, todo eso con la finalidad de sustituir de manera parcial o total en las labores que realizan los seres humanos, son capaces de de recibir y analizar la información del entorno donde se encuentran, de esa forma llevan a cabo las tareas de manera satisfactoria.
emplea distintas disciplinas como la informática, la electrónica, la mecánica, entre otras más para llevar a cabo su práctica, muchos han sido los científicos que con el pasar de los años y a raíz del ensayo y error han llevado a la robótica ha donde se encuentra hoy en día.
HISTORIA
La mayoría de la gente tiende a creer que la robótica es una ciencia nueva con muchas expectativas de futuro pero, la realidad es que tiene más de un siglo.
Los primeros robots creados en toda la historia de la humanidad, no tenían más que un solo fin: entretener a sus dueños, así, a mediados del siglo XVIII J. de Vaucanson construyó varias muñecas mecánicas de tamaño humano que ejecutaban piezas de música.
Poco a poco, los expertos de la época, comenzaron a darse cuenta de que los robots eran capaces de imitar movimientos humanos o de criaturas vivas, lo cual permitiría que éstos realizaran movimientos mecánicos y ahorrar esfuerzo, tiempo y trabajo a los humanos. No es extraño suponer que los primeros robots que realizaban tareas automatizadas fueron creados para las fábricas. En 1801 J. Jaquard invento el telar, que era una máquina programable mediante tarjetas perforadas.
La palabra robot se empleó por primera vez en 1920 en una obra de teatro llamada “R.U.R.” o “Los Robots Universales de Rossum” escrita por el dramaturgo checo Karel Capek. La trama era sencilla: el hombre fabrica un robot luego el robot mata al hombre.
Muchas películas han seguido mostrando a los robots como máquinas dañinas y amenazadoras. La palabra checa ‘Robota’ significa servidumbre o trabajador forzado, y cuando se tradujo al ingles se convirtió en el término robot.
EXPONENTES
1. En 1805 Maillardet construyó una muñeca mecánica capaz de hacer dibujos, lo que recordó que las máquinas robóticas no solo podían concebirse para la industria.
2. En el año 1946, el inventor americano G.C. Devol desarrolló un dispositivo que registraba señales eléctricas por medios magnéticos y las reproducía para accionar una máquina mecánica. Su patente fue emitida en 1952.

3. Comienzan a comercializarse los primeros robots a finales de los años 50. El primer robot comercial fue desarrollado por la empresa Planet Corporation y fue instalado por primera vez en la Ford Motors Companypara atender una máquina de fundición de troquel.
5. La década de los 70 se dedicó a grandes investigaciones en el campo de la robótica. La Universidad de Standford crea un pequeño brazo de robot de accionamiento eléctrico. En 1973 se desarrolla el primer lenguaje de programación creado específicamente para robótica: WAVE.
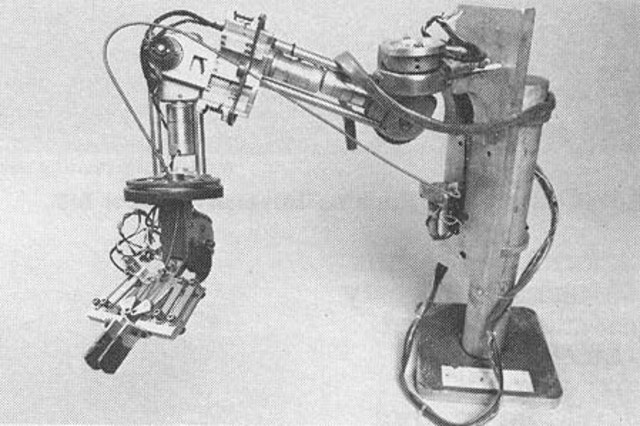
6. Victor Scheinman crea, en 1975, un brazo manipulador programable universal. Un producto de Unimation.
7. Isaac Asimov fue un escritor y bioquímico judío nacionalizado como estadounidense. Su influencia se debe a la escritura de una serie de obras ficticias sobre los robots. La importancia radica en que, en todos sus libros explica conceptos científicos reales siguiendo una línea histórica. Así creó obras como Los robots del amanecer, Robots e imperio, Yo robot… En todas ellas se anticipa al futuro previendo lo que podría suceder. La más famosa es Yo robot.
COMPONENTES
Un robot está formado por los siguientes elementos: estructura mecánica, transmisiones, actuadores, sensores, elementos terminales y controlador. Aunque los elementos empleados en los robots no son exclusivos de estos (máquinas herramientas y otras muchas máquinas emplean tecnologías semejantes)
- Los componentes principales de un robot son los siguientes:
Manipulador: mecánicamente, es el componente principal. Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Las partes que conforman el manipulador reciben, entre otros, los nombres de: cuerpo, brazo, muñeca y actuador final (o elemento terminal). A este último se le conoce habitualmente como aprehensor, garra, pinza o gripper.
PROYECTOS
Horizonte 2020 contribuirá a cumplir un requisito previo: que los robots comprendan mejor a los humanos. Un ejemplo notable es el proyecto ROBDREAM, mediante el que se logrará que las fases inactivas de los robots sean tan provechosas como lo son para los humanos.
Al igual que estos sueñan cuando duermen, el proceso de aprendizaje de los robots no debería detenerse al suspender su actividad. Este tiempo de inactividad debería aprovecharse para «reflexionar» sobre la experiencia acumulada y mejorar la capacidad de resolver problemas futuros. También deberán aprender de los humanos en lo que concierne a la interacción con su entorno y con los propios «colegas» humanos, y proyectos como SOMA («Soft-bodied Intelligence for Manipulation») y COGIMON («Cognitive Interaction in Motion») son dos iniciativas que trabajan en este sentido.
Los robots no deberían convertirse en copias perfectas de sus creadores bajo ningún concepto. A medida que evoluciona la tecnología, queda cada vez más claro que los robots deben destinarse a ejecutar tareas difíciles o tediosas como la limpieza de residuos nucleares (ROMANS), el mantenimiento industrial (SECONDHANDS), tareas varias en cadenas de montaje (SARAFUN), la fabricación de aeronaves (COMANOID), el mantenimiento de espacios industriales (AEROARMS), el lavado de suelos (FLOBOT), la inspección de emplazamientos azotados por catástrofes en condiciones de visibilidad reducida (SMOKEBOT), la vigilancia de instalaciones submarinas (WIMUST) e incluso la recolección de pimientos (SWEEPER).
VIDEOS PAINT 3D
ROBOTICA
No hay comentarios:
Publicar un comentario